1. 问题定义:
给定观测样本$x_1, x_2, …, x_N$,设其独立同分布(iid),但分布形式未知,如何从样本中估计出概率密度函数(pdf) ?
不用对pdf的形式做任何假设,直接用样本估计出整个函数。某种意义上,非参数估计也可以理解为无限参数的估计,因为对pdf形式的假设其实给分布定下了很强的限制,参数个数一般决定了模型复杂度,而非参数估计的限制非常弱,可以认为模型复杂度无穷大。
2. 基本思路
考虑一个小区域R,某个随机向量落入这个区域的概率是 \(P_R=\int_R{p(\boldsymbol{x})d\boldsymbol{x}}\) (这里$x$可以是标量或向量,我懒得打\boldsymbol了,后面就当做标量吧,不影响结论)
假定$p(x)$连续,则当R足够小,可以认为在该范围内$p(x)$没有变化,是常数。则上式可近似为 \(P_R=\int_R{p(\boldsymbol{x})d\boldsymbol{x}}=p(x)V\) 其中$V=\int_R{dx}$,是所选区域的体积。那么也就有$p(x)=\frac{P_R}{V}$
这里问题就是,$P_R$和$V$分别怎么估计
3. 方法举例
###3.1. 直方图法 方法: (1)把样本$x$在其取值范围内分割成$M$个等间隔的小窗,如果$x$是$d$维向量则把每一维都分成$M$等份,这样就得到$M^d$个小窗,因为都是超立方体,体积$V$也很好求,且每个小窗的体积是一样的 (2)统计落入每个小窗的样本数$k_m$ (3) \(\hat p(x)=\frac{k}{NV}\)
其中$\hat p(x)$是对$x$位置的pdf的估计,$k$为落入$x$所在小窗的样本点的个数,$N$为样本总个数,$V$为小窗的体积。
解释:
$P_R$的估计: 样本集中,落入这个区域R的点的个数$k$服从二项分布,即 $k \thicksim B(N,P_R)$,那么$\frac{k}{N}$就是二项分布下$P_R$的无偏估计和极大似然估计了
$V$的估计: 没有什么好估计的,每个小窗的$V$都一样,是划分小窗的时候就固定的
优缺点: 优点:
- 最简单直观,也是日常用得最多的
- 理论上,当样本量趋于无穷多,$\hat p(x)$可以收敛于$p(x)$
缺点:
- 小窗数的选择影响很大,选择过小会导致估计的pdf非常粗糙,选择过大会导致有一些小窗内没有样本或者样本很少,使得估计的pdf很不连续
- 收敛的条件是:a). ${lim \atop {n->\infty}} V_n=0$, b). ${lim \atop {n->\infty}} k_n = \infty$, c). ${lim \atop {n->\infty}} \frac{k_n}{n}=0$。即要求样本无穷多,小窗体积无穷小,每个小窗里的点无穷多,但相对总样本的比例无穷小。这个要求导致小窗的选取要与样本数、样本分布都有关,非常不方便。
- 由于概率分布有高密度区域和低密度区域,也很有可能小窗数会相对高密度区域过小,相对低密度区域又过大
3.2. $k_N$近邻估计法
方法: (1)对于任意坐标$x$,计算其附近的$k_N$个样本点,这个$k_N$是根据$N$的数量由用户自己设定的参数,常见的选择策略是$k_N\thicksim k\sqrt{N}$ (2)包含这k个样本点的最小小窗的体积记为$V$
解释: 和直方图法正好相反,$k_N$法固定了$P_R=\frac{k_N}{N}$,主要估计的是$V$,也比较直观。此外,$V$会在密度高的地方较小而在密度低的地方自动增大。
优缺点: 能比较好地兼顾高密度与低密度区域估计的连续性
3.3. parzen窗法
方法: \(\hat p(x)=\frac{1}{N}\Sigma_{i=1}^{N}{K(x,x_i)}\)
其中$K(x,x_i)$叫窗函数,是需要满足pdf要求的函数,即 \(K(x,x_i)\geq0 \text{ ,且} \int{K(x,x_i)dx=1}\) 其几种常见的窗函数: (1)方窗
\[\begin{equation} k(x_,x_i) = \begin{cases} \frac{1}{h^d} &\text{if } |x^j-x^j_i\leq h/2|, j=1,2,...,d \\ \\ 0 &\text{else} \end{cases} \end{equation}\](2)高斯窗 \(k(x,x_i)=\frac{1}{\sqrt{(2\pi)^d\rho^{2d}|Q|}}\exp{\lbrace -\frac{(x-x_i)^TQ^{-1}(x-x_i)}{2\rho^2}\rbrace}\)
(3)超球窗 \(\begin{equation} k(x_,x_i) = \begin{cases} V^{-1} &\text{if } ||x-x_i\leq \rho|| \\ \\ 0 &\text{else} \end{cases} \end{equation}\) 其中$V$是超球的体积,$\rho$是超球半径
解释: 一般来说窗函数是$||x-x_i||$的函数,我认为可以从两个角度理解,对于待估计的任意一点$x$,窗函数是把整个空间赋予了权重,样本点以其所在位置的权重贡献给$P_R$,而权重的要求是其全定义域积分为1,所以$V=1$。
从样本的角度,每个样本点以一个“窗函数”的形式对定义域里的所有位置产生影响,当然像方窗这样设定阈值,阈值之外贡献都是0的例子也有。下图示意的是高斯窗的场景。
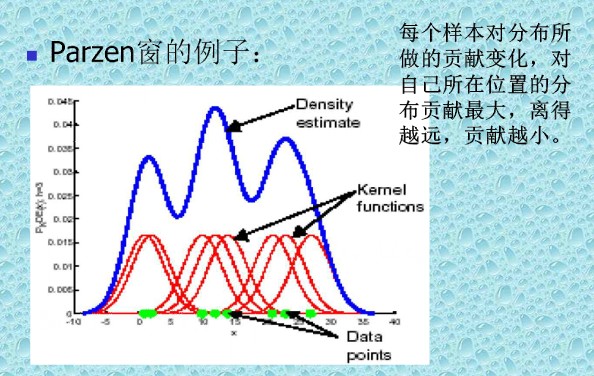
优缺点: 每一个位置的pdf估计都用上了所有样本的信息,是这几种方法里最有效利用了信息的一个。窗函数及其参数选的好,可以保证pdf的连续性,甚至用很小的样本量就学到非常逼近的pdf。
但是窗函数的选取其实应该包含着使用者对pdf的某种假设,这与非参数学习的思想不是特别契合。